Una revisión sistemática de literatura
sobre implementaciones de sistemas
de control de tráfico
Eduardo Rodrigo Wong Leon
https://orcid.org/0009-0000-6544-9114
Universidad Católica Sedes Sapientiae, Perú
Marco Antonio Coral Ygnacio
https://orcid.org/0000-0001-6628-1528
Universidad Católica Sedes Sapientiae, Perú
Recibido: 30 de noviembre de 2023 / Aceptado: 14 de febrero de 2024
doi: https://doi.org/10.26439/interfases2024.n19.6779
RESUMEN. La congestión vehicular es una problemática que se manifiesta frecuentemente en ciudades con alta población y puede deberse a diversos factores, como la incorrecta planificación civil o el transporte público deficiente. Esto provoca un incremento en los accidentes de tránsito, la contaminación del aire, la pérdida de combustible y el descontento ciudadano. Por ello, se considera importante la implementación de sistemas de control de tráfico que genere fluidez en el tránsito vehicular y reduzca los tiempos de viaje. Este trabajo desarrolla una revisión sistemática de la literatura con el propósito de identificar los métodos, algoritmos y modelos más eficientes para la construcción de un sistema de control de tráfico. Los resultados identifican tres métodos y tres algoritmos considerados muy eficientes para el desarrollo de estos sistemas, de los cuales se resaltan el filtro bayesiano y las redes neuronales convolucionales. También se demuestra que You Only Look Once, conocido como YOLO, es el modelo de procesamiento de imagen más eficiente para estas implementaciones.
PALABRAS CLAVE: control de tráfico / métodos / algoritmos / modelos / YOLO / implementaciones
A systematic literature review of traffic control system
implementations
ABSTRACT. Traffic congestion frequently occurs in highly populated cities and can result from poor civil planning or inadequate public transportation. This issue increases traffic accidents, air pollution, fuel loss, and public dissatisfaction. Therefore, implementing traffic control systems that improve traffic flow and reduce travel times becomes essential. This work conducts a systematic literature review to identify the most efficient methods, algorithms, and models for developing traffic control systems. The review identifies three methods and three algorithms that are highly efficient for these systems, highlighting Bayesian filters and convolutional neural networks. It also shows that You Only Look Once (YOLO) is the most efficient image processing model for these implementations.
KEYWORDS: traffic control / methods / algorithms / models / YOLO / implementations
1. INTRODUCCIÓN
La congestión vehicular se manifiesta muchas veces en ciudades en desarrollo, las cuales cuentan con poco avance o inversión en el control de tránsito (Kumaran et al., 2019). Durante las horas pico de la mañana y la noche, se convierte en un problema crónico que, si no es solucionado, seguirá afectando enormemente no solo a la eficiencia del transporte ciudadano, sino también a la calidad de vida de sus residentes.
Durante los últimos años, se han realizado esfuerzos para abordar la congestión de tráfico con nuevos métodos y tecnologías, donde el uso de la inteligencia artificial (IA) ha sido la preferida (Chabchoub et al., 2021). En esta línea, el procesamiento de imágenes utiliza dispositivos inteligentes como cámaras de alta resolución. Asimismo, existen propuestas basadas en metodologías de optimización a fin de predecir el comportamiento del tráfico para su control (Cheng et al., 2023).
La congestión del tráfico es un problema de gran relevancia debido a sus múltiples repercusiones, tales como el incremento de accidentes de tránsito, la contaminación del aire, el descontento de la ciudadanía, entre otros. La importancia del tema radica en la necesidad de optimizar la gestión del tráfico y reducir los problemas asociados, así como mejorar la calidad de vida de los residentes y fortalecer la eficiencia de la administración municipal (Joo & Lim, 2021).
En los años recientes se ha propuesto la aplicación de metodologías y modelos basados en IA como las redes convolucionales (Vélez-Serrano et al., 2021) o sistemas multiagentes (Wakkumbura et al., 2021). De este modo, se brindan soluciones precisas y eficientes, pero que en ocasiones no son adaptables a más de un contexto.
A pesar de la evolución y uso de tecnologías basadas en IA, el control de tráfico sigue teniendo deficiencias en ciudades con mucha aglomeración de personas y que carecen de la incorporación de tecnología de vanguardia en sus instrumentos de control de tránsito (Liu et al., 2020). La motivación del trabajo se centra en detectar propuestas viables para el control de tráfico en ciudades grandes y que aproveche las herramientas ya incorporadas, sin requerir un cambio masivo en estas.
Se propone una revisión sistemática de literatura para identificar las tecnologías, métodos y modelos utilizados en la construcción de sistemas de control de tráfico y cuáles de estos resultan más viables y eficientes. Esto se realiza con el objetivo de recopilar soluciones para reducir la congestión vehicular a través de un sistema de control de semáforos.
Esta revisión sistemática de literatura sigue la metodología de Kitchenham (2009), que utiliza su ciclo de recopilación y selección de bibliografía para obtener artículos relevantes al campo de estudio de investigación y conseguir una conclusión precisa.
El presente artículo se organiza en cinco capítulos. En el primero, se encuentra la introducción del artículo; el segundo detalla el estado del arte del tema de investigación; el tercero describe la metodología y el proceso de revisión de literatura; el cuarto muestra los resultados de la investigación, y las conclusiones se detallan en el quinto capítulo.
2. ESTADO DEL ARTE
Las soluciones de control de tráfico muestran una transición hacia soluciones más avanzadas y adaptativas, impulsadas en gran medida por la aplicación de la IA y la tecnología (Wang et al., 2023). Estas tecnologías están diseñadas para abordar los desafíos de la congestión vehicular en ciudades grandes, optimizar la gestión del tráfico y mejorar la calidad de vida de los residentes (Chabchoub et al., 2021).
Control de tráfico
El control de tráfico es un campo de estudio amplio y crucial en la gestión del transporte y la movilidad urbana que implica administrar los componentes viales de tránsito vehicular. De esta forma, se enfoca en lograr la optimización y evitar problemáticas de congestión y accidentes vehiculares (Li et al., 2021).
Se han desarrollado diversas estrategias a lo largo de los años para abordar la congestión vehicular y mejorar la eficiencia del tráfico. Tradicionalmente, el control de tráfico se ha basado en la programación de tiempos fijos para semáforos y el uso de sensores de tráfico en las intersecciones. Sin embargo, durante estos últimos años, con el avance de la tecnología y la incorporación de la IA, se han explorado enfoques más dinámicos y adaptativos que puedan mejorar la eficiencia de tránsito en las ciudades con aglomeración de vehículos. Por ejemplo, ciertas propuestas son el uso de redes neuronales (Shin et al., 2019) o modelos de predicción (Bao et al., 2023) y control de semáforos (Tunc & Soylemez, 2023) para la generación de “olas verdes”.
2.1 La tecnología en el control de tráfico
La tecnología desempeña un papel fundamental en el control de tráfico (Rasheed et al., 2022), lo que ha permitido una mayor flexibilidad en la gestión del flujo vehicular. Pueden incluir sensores de tráfico avanzados, cámaras de vigilancia y sistemas de semaforización inteligente. Los sensores de vanguardia utilizan IA y aprendizaje profundo, como redes convolucionales neuronales (CNN) y redes neuronales recurrentes, que les permiten registrar nuevos datos en tiempo real y mejorar su propia base de datos, lo que aumenta su precisión. Las cámaras de vigilancia utilizadas para el control de tráfico normalmente incluyen procesamiento local, como las NVIDIA DeepStream, que permite incorporar modelos inteligentes, como YOLO (You Only Look Once). Estas tecnologías se enfocan en conectarse a un sistema general para utilizar los datos recopilados en tiempo real con el objetivo de una toma de decisiones más profunda y de mayor precisión para optimizar el tráfico (Phursule et al., 2023). No obstante, con la llegada de la IA, cada vez se requiere menos del factor humano y la toma de decisiones es delegada a agentes inteligentes que han recibido entrenamiento o aprenden en tiempo real, lo que reduce el trabajo del personal de monitoreo y mitiga la posibilidad de error y demora humana.
En países desarrollados, se ha creado el concepto smart cities (Aqib et al., 2019), que incorpora de manera integral la IA para acoplar la gestión de tráfico a otros ámbitos, como la comunicación entre vehículos privados, infraestructuras y peatones conectados con el internet de las cosas (Chahal et al., 2023).
2.2 Aplicación de la IA en el control de tráfico
La IA ha revolucionado el campo del control de tráfico al proporcionar herramientas y técnicas avanzadas para la toma de decisiones y la optimización en tiempo real. Algunos campos clave de la IA relacionados con el control de tráfico se detallarán a continuación.
2.2.1 Procesamiento de imagen
El procesamiento de imágenes desempeña un papel crucial en la supervisión y el control del tráfico. Se utilizan cámaras de alta resolución para capturar imágenes de las intersecciones y carreteras en tiempo real, y luego se aplican algoritmos de visión por computadora para analizar el flujo de tráfico, detectar vehículos, peatones y condiciones de la carretera. Esto proporciona datos visuales esenciales que permitirán el entrenamiento y posterior toma de decisiones en tiempo real de los modelos inteligentes de control de semaforización para la optimización del flujo de tráfico (Shin et al., 2019). Aunque en ocasiones puede ser impreciso debido a eventos inusuales o específicos que generalmente no suceden, cada año se proponen mejoras de precisión con el uso de nuevos modelos de IA (Chabchoub et al., 2021).
2.2.2 Predicción de tráfico
La predicción de tráfico implica el uso de modelos de IA para anticipar el comportamiento del tránsito en un área determinada. Estos modelos reciben datos históricos de tráfico, condiciones meteorológicas, eventos especiales y otros factores relevantes a través de entradas que, para el tema de tránsito, generalmente provienen de sensores y videocámaras (Chahal et al., 2023).
Aunque principalmente se utiliza el aprendizaje guiado y supervisado para entrenar los modelos de predicción (Aqib et al., 2019), se han desarrollado propuestas para permitir que estos modelos aprendan mientras están en funcionamiento y utilizan datos en tiempo real (Hao et al., 2020).
2.2.3 Semaforización inteligente
Los sistemas de semaforización inteligente utilizan algoritmos y modelos de IA para ajustar los tiempos de los semáforos de manera dinámica en función de las condiciones actuales del tráfico (Rasheed et al., 2022). Esto permite una mejor adaptación a las necesidades del tráfico en tiempo real, lo que reduce la congestión y mejora la fluidez. Estos sistemas suelen integrarse con datos de sensores y cámaras para tomar decisiones informadas, incluso utilizan modelos de predicción que incrementen su nivel de precisión para generar olas verdes (Hao et al., 2019).
3. METODOLOGÍA
A través de la revisión sistemática de literatura, se pueden sintetizar conocimientos, descubrimientos, métodos y tecnologías utilizadas en las implementaciones de sistemas de control de tráfico. En esta investigación, se toma de guía el marco metodológico propuesto por Kitchenham (2009), que consta de tres etapas: planificación, realización e informe de la revisión.
3.1 Planificación de la revisión
Para la fase de planificación, se define el tema de investigación con el propósito de determinar el alcance de la revisión. Luego, se determinan preguntas de investigación referentes al tema seleccionado. Estas se muestran a continuación.
- P1: ¿Qué algoritmos y métodos se utilizan en la construcción de sistemas de control de semaforización?
- P2: ¿Qué modelos de reconocimiento de objetos por imagen se utilizan para la identificación de densidad vehicular?
- P3: ¿Qué patrones se deben considerar para la identificación de vehículos por imagen?
- P4: ¿Qué algoritmos y métodos son los más eficientes para construir un sistema sobre la infraestructura de tráfico existente?
3.2 Realización de la revisión
En esta etapa, se detalla el procedimiento de revisión de literatura, así como se explica la fase de búsqueda y selección de bibliografía.
3.2.1 Estrategias de búsqueda
Para la búsqueda de fuentes bibliográficas en la base de datos Scopus se utilizan palabras clave referentes a las preguntas de investigación del tema de control de tráfico. Con estas se formula la cadena de búsqueda: (“traffic signal control” OR “smart traffic light” OR “traffic light control”) AND (“vehicle counting” OR “vehicle detection” OR sensors) AND (“image recognition system” OR “image processing” OR software OR algorithms).
Se determinan criterios que mejoren la calidad de los resultados, como que estos no tengan una antigüedad mayor a los 5 años o que cuenten con una versión en inglés. También se establece que los artículos deben contar con el Identificador de Objeto Digital (DOI) para garantizar su confiabilidad. Es esencial que los artículos seleccionados se centren en el tema de control de tráfico con propuestas de implementación o aplicación para obtener resultados en contextos reales y una conclusión precisa. Los criterios a tomar en cuenta para la búsqueda y posterior selección de artículos son los que se muestran a continuación en la Tabla 1.
Tabla 1
Criterios de inclusión y exclusión
|
Criterios de inclusión |
Criterios de exclusión |
|
- Artículos centrados en la investigación |
- Investigación descriptiva - Sin implementación |
|
- Artículos con DOI - Publicación en inglés |
- Artículos que no se relacionen con el tema |
|
- Artículos centrados en técnicas, |
- Informes, revistas, boletines, comentarios - Antigüedad mayor a 5 años |
3.2.2 Selección de estudios
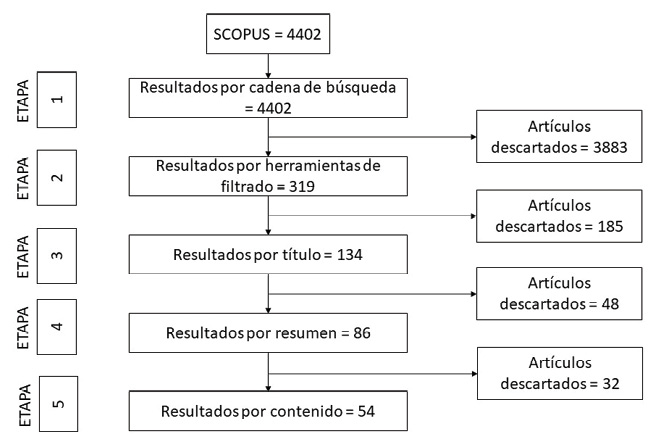
A partir de la cadena de búsqueda, durante la primera etapa del cribado, se seleccionaron 4402 artículos. La segunda etapa se realizó utilizando las herramientas disponibles por la base de datos de Scopus y considerando los criterios definidos en la Tabla 1, donde se optaron por 319 artículos. Para la tercera etapa, se revisaron títulos referentes al tema de control de tráfico, donde quedaron 134 artículos. Luego, se realizó una revisión del resumen para asegurar la relevancia y utilidad de los artículos, que resultó así en 86 artículos seleccionados. Finalmente, se efectuó la lectura del texto completo del artículo, donde se eligieron 54 de ellos. A continuación, se resume el proceso de selección y cribado en la Figura 1.
Figura 1
Diagrama de flujo de cribado
3.2.3 Extracción y análisis de datos
Se realiza un análisis cuantitativo representado en gráficos estadísticos a partir de los datos extraídos de la realización de la revisión. En el siguiente enlace se puede encontrar el procedimiento de extracción y análisis de datos con mayor detalle: https://docs.google.com/spreadsheets/d/1rVCe81Os0tMwbYX9mGeQvW6opIaoMelK/edit?usp=drive_link&ouid=109493883837738690362&rtpof=true&sd=true
La Figura 2 muestra las publicaciones por año. A partir de ella es posible determinar que existe un interés creciente desde el 2021 en el tema del control inteligente de tráfico. Esto sugiere que existe una demanda global de soluciones para esta problemática, excepto por el año 2020 que tuvo una caída drástica en la publicación de artículos, posiblemente debido a la pandemia del COVID-19. La creciente demanda de soluciones a la problemática de control de tráfico con semaforización inteligente podría crear oportunidades para la colaboración internacional y el desarrollo de nuevas tecnologías que sean aplicables a una variedad de contextos.
La Figura 3 muestra la cantidad de artículos publicados por revistas especializadas. Se puede notar que existe una mayor cantidad de publicaciones alrededor del tema de control inteligente de tráfico en las revistas Sensors (7), Applied Sciences (6) y Journal of Advanced Transportation (4). Esto nos indica que en estos espacios académicos es posible encontrar información del tema de investigación en mayor cantidad y con un mayor desarrollo. Por lo tanto, esto nos permite formar un juicio previo del artículo al momento de seleccionar uno para cerciorar un punto o afirmación referente al tema de investigación.
Figura 2
Artículos publicados por año

Figura 3
Artículos publicados por una revista especializada

En la Figura 4 se muestran los países con más artículos publicados, en donde China (20) e India (6) son los que cuentan con una mayor cantidad de estas investigaciones. Del gráfico, se han excluido 11 países, pues solo cuentan con una sola publicación. Se determina que la problemática e investigación de soluciones del tema de control de tráfico abunda mayoritariamente en países orientales como China, debido a la sobrepoblación en sus principales ciudades. Esto nos indica que los artículos pertenecientes a estos países desarrollan un enfoque más amplio y cercano a la problemática, además de realizarlo en una cantidad mayor que en países occidentales.
Figura 4
Artículos publicados por país

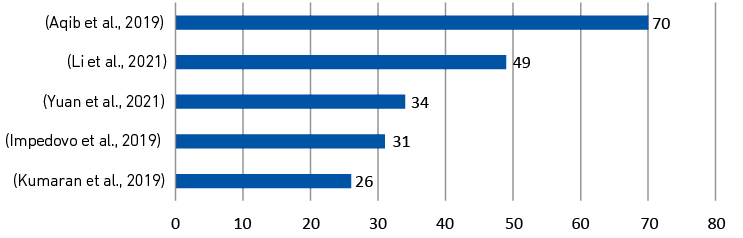
La Figura 5 expone los cinco artículos con mayor cantidad de citaciones en otros trabajos. El más citado tiene 70; el segundo lugar, 49, y el tercero, 34. Todos son citados al menos una vez por algún autor. Siete trabajos cuentan con solo una citación. Se determina a través del gráfico que existen múltiples citaciones, lo cual demuestra el interés en los temas tratados.
Figura 5
Artículos con mayor cantidad de citaciones
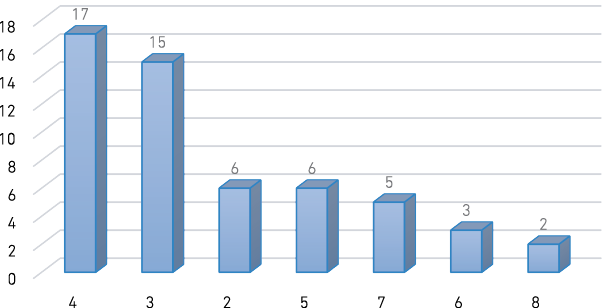
La Figura 6 presenta el número de artículos publicados según la cantidad de autores. Se evidencian 17 publicaciones con cuatro autores, 15 con tres autores y también 2 trabajos con ocho autores cada uno. Ningún trabajo cuenta con solo un autor. De esta forma, se manifiesta que alrededor del tema de control inteligente de tráfico existe una mayor colaboración entre varios investigadores. Esto podría indicar que una solución inteligente para el problema de control de tráfico resulta lo suficientemente compleja como para necesitar varios especialistas de diversos enfoques y áreas.
Figura 6
Cantidad de autores por artículos publicado
3.3 Informe de la revisión
En esta etapa, se recopilan los resultados y respuestas a las preguntas de investigación definidas en la primera etapa obtenidas tras la revisión de literatura. A continuación, se responden a las cuatro preguntas.
P1: ¿Qué algoritmos y métodos se utilizan en la construcción de sistemas de control de semaforización?
Un algoritmo es un grupo de instrucciones organizadas y secuenciadas que en conjunto sirven para un propósito o función. En programación, la principal diferencia entre algoritmo y método es que este último es una implementación específica y concreta del primero. En la Tabla 3, se recopilan y describen los algoritmos y métodos utilizados por los autores en sus propuestas de implementación. Solo se rescatan aquellos de uso principal que son señalados y detallados en el proceso de construcción del sistema de los artículos revisados.
Tabla 3
Algoritmos y métodos utilizados en sistemas de control de semaforización
|
REFERENCIA |
ALGORITMO |
MÉTODO |
DESCRIPCIÓN |
|
Yuan et al. (2021); Jin y Ma (2019) |
Bayesian Filter |
Es un método basado en un filtro recursivo que se utiliza para estimar el estado de un sistema dinámico a partir de una secuencia de mediciones ruidosas y medir su incertidumbre. |
|
|
|
Bi-level |
Es un tipo de algoritmo de optimización que se utiliza para resolver problemas con dos niveles de toma de decisiones. |
|
|
Shin et al. (2019); Vélez-Serrano |
Convolutional Neural Network (CNN) |
Es un tipo de algoritmo de aprendizaje profundo que es particularmente adecuado para la clasificación y reconocimiento de imágenes. |
|
|
Tan et al. (2022); Aqib et al. (2019); Bao et al. (2023); Islam |
Deep Learning |
Es un método de aprendizaje automático que utiliza redes neuronales artificiales para aprender de los datos procesados. |
|
|
Mukhtar et al. (2023); Rasheed et al. (2022); Joo y Lim (2021); |
Deep Q-Network (DQN) |
Es un algoritmo de aprendizaje por refuerzo que utiliza el aprendizaje profundo para aprender una política. DQN ha demostrado que es efectivo para resolver una variedad de problemas, como realizar predicciones y controlar mecanismos inteligentes. |
|
|
Damadam et al. (2022); Rasheed et al. (2022); Tan et al. (2022); Wu |
Deep |
Es un método de aprendizaje por refuerzo que utiliza el aprendizaje profundo para aprender una política. |
|
|
Tunc y Soylemez (2023); Chabchoub et al. (2021); Chatterjee et al. (2019); Wakkumbura et al. (2021) |
Fuzzy Logic Control (FLC) |
Es un tipo de sistema de control que utiliza lógica borrosa para tomar decisiones. FLC se utiliza para controlar sistemas complejos que son difíciles de modelar utilizando métodos de control tradicionales. |
|
|
Yuan et al. (2021); |
Gaussian |
Es un método estadístico que se puede utilizar para la regresión, clasificación y predicción. |
|
|
Kim et al. (2023) |
Genetic |
Es un algoritmo metaheurístico que está inspirado en el proceso de selección natural y es utilizado para resolver problemas de optimización. |
|
|
Mukhtar et al. (2023) |
Graph |
Es un tipo de algoritmo de aprendizaje profundo que se puede utilizar para aprender en base de datos representados como grafos. |
|
|
Shin et al. (2019); Chabchoub et al. (2021); Wakkumbura et al. (2021); Zhang et al. (2020); Li et al. (2021) |
Image |
Es un método que utiliza un conjunto de técnicas para manipular y analizar imágenes digitales. |
|
|
Bao et al. (2023); Cheng et al. (2023); Hao et al. (2020); Islam et al. (2022); Chahal et al. (2023) |
Long Short-Term Memory (LSTM) |
Es un método que utiliza redes neuronales recurrentes para el procesamiento de datos secuenciales, como el procesamiento del lenguaje natural y la traducción automática. |
|
|
Damadam et al. (2022); Korecki y Helbing (2022); Kumaran et al. (2019); Yuan et al. (2021); Wakkumbura et al. (2021); Szoke et al. (2023); Impedovo et al. (2019) |
Machine |
Es un método que le da a las computadoras la capacidad de aprender sin ser programadas explícitamente, se puede utilizar para resolver una amplia gama de problemas, como clasificación, regresión y predicción. |
|
|
Wakkumbura et al. (2021); Suga et al. (2023); Mukhtar et al. (2023); Rasheed et al. (2022); Shehu et al. (2020); Li et al. (2021) |
Multi Agent Technology |
Es un método que se ocupa del diseño y desarrollo de sistemas que consisten en el uso de múltiples agentes inteligentes para resolver problemas complejos que no pueden ser resueltos por un solo agente. |
|
|
Cheng et al. (2023) |
Snake Optimization Algorithm |
Es un tipo de algoritmo metaheurístico que está inspirado en el movimiento de las serpientes y es efectivo para optimizar el procesamiento de información. |
P2: ¿Qué modelos de reconocimiento de objetos por imagen se utilizan para la identificación de densidad vehicular?
Los modelos inteligentes son pequeños sistemas capaces de tomar decisiones y adaptarse a través del conocimiento e información adquiridos antes y durante su funcionamiento. La Tabla 4 muestra los modelos de procesamiento de imagen para reconocimiento de objetos utilizados en la construcción de sistemas de control de semaforización propuestos en los artículos revisados. En cada modelo se describe su uso en el proceso y las características que lo diferencian.
Tabla 4
Modelos de reconocimiento de objetos utilizados en identificación de densidad vehicular
|
REFERENCIA |
MODELO |
DESCRIPCIÓN |
|
Shin et al. (2019); Chabchoub et al. (2021); Wakkumbura et al. (2021); Zhang et al. (2020); Li et al. (2021) |
You Only Look Once (YOLO) |
Es un modelo detector de objetos de una sola pasada que identifica y clasifica objetos en una imagen en un solo paso. Puede predecir todas las cajas delimitadoras, clases y probabilidades en una sola pasada. |
|
Chabchoub et al. (2021); Wakkumbura et al. (2021) |
Single Shot MultiBox Detector (SSD) |
Es un modelo de reconocimiento de objetos de detección rápida que identifica y clasifica objetos en una imagen en un solo paso. Es similar a YOLO, pero dado que utiliza cajas delimitadoras predefinidas puede ser más precisa, aunque también más lenta. |
|
Li et al. (2021) |
Faster R-CNN |
Es un modelo detector de objetos de dos pasos que primero genera un conjunto de regiones candidatas y luego clasifica cada región candidata. Esto puede ser más preciso que YOLO y SSD, pero es menos eficiente. |
|
Li et al. (2021) |
Mask R-CNN |
Es una extensión de Faster R-CNN que también predice máscaras para cada objeto detectado. Esto permite al modelo segmentar los objetos detectados, lo que es útil para aplicaciones como el reconocimiento de objetos y la visión por computadora de la robótica. |
P3: ¿Qué patrones se deben considerar para la identificación de vehículos por imagen?
Los patrones son un conjunto de características recurrentes que pueden ser identificadas dentro de un grupo de datos. En la Tabla 5, se recopilan los aspectos y características que los autores señalan para el entrenamiento del modelo inteligente para procesamiento de imagen en sus propuestas. Se mencionan únicamente los patrones que contribuyen a la precisión del modelo para el reconocimiento de vehículos.
Tabla 5
Patrones para la identificación de vehículos por procesamiento de imagen
|
REFERENCIA |
PATRONES |
DESCRIPCIÓN |
|
Li et al. (2021); Wakkumbura et al. (2021) |
Formas |
La mayoría de carros siguen formas estandarizadas con las que se puede facilitar la identificación como del tipo muscle o sedán. |
|
Shin et al. (2019); Li et al. (2021) |
Dimensiones |
Los autores señalan que, tras una correcta configuración del contexto de reconocimiento, se puede identificar vehículos con mayor facilidad gracias a sus dimensiones superiores a otros objetos o personas que se desplacen en la imagen. |
|
Tunc y Soylemez (2023); Chabchoub et al. (2021); Li et al. (2021) |
Color |
Cambios abruptos en las tonalidades facilitan la identificación de los vehículos. |
|
Li et al. (2021) |
Placas de |
El autor señala que la identificación de una placa vehicular dentro de una de las formas facilita su reconocimiento como vehículo. |
P4: ¿Qué algoritmos y métodos son los más eficientes para construir un sistema sobre la infraestructura de tráfico existente?
La Tabla 6 detalla un análisis general de eficiencia de los algoritmos y métodos utilizados en las propuestas de los autores, donde se observa que las características que estos consideran afectan de manera positiva o negativa en la precisión y confiabilidad de sus sistemas de control de semáforos. Se determina el nivel de eficiencia en tres estados: ineficiente, eficiente y muy eficiente. La calificación se basa en las observaciones y resultados de optimización de las colas de tráfico presentadas en los trabajos revisados. Si la reducción de longitud de cola es menor al 20 % y presenta dificultades que afectan a la precisión del sistema, se considera ineficiente. Si la reducción de longitud de cola es menor al 20 % y las dificultades no afectan a la precisión del sistema, o la reducción es mayor y las dificultades sí afectan, se considera eficiente. Si la reducción supera el 20 % y las dificultades son ajenas a la precisión del sistema, se considera muy eficiente. También se compara su eficiencia con el resto para incrementar la confiabilidad de la calificación. La Tabla 6 muestra la rúbrica establecida para la calificación del nivel de eficiencia.
Tabla 6
Rúbrica de evaluación de nivel de eficiencia
|
Reducción de longitud de cola menor a 20 % |
Reducción de longitud de cola mayor a 20 % |
|
|
Las dificultades presentadas afectan a la precisión del sistema. |
Ineficiente |
Eficiente |
|
Las dificultades presentadas no afectan a la precisión del sistema. |
Eficiente |
Muy eficiente |
Tabla 7
Nivel de eficiencia de algoritmos y métodos utilizados en sistemas de control de semaforización
|
REFERENCIA |
ALGORITMO/MÉTODO |
NIVEL |
OBSERVACIONES |
|
Stoilova y Stoilov (2022); Chahal et al. (2023) |
Bi-level |
Eficiente |
Uno de los autores señala que su funcionamiento por dos niveles incrementa su precisión y utilidad, pero su capacidad de adaptación a problemas muy específicos es inferior en comparación a otros algoritmos. |
|
Tunc y Soylemez (2023); Chabchoub et al. (2021); Chatterjee et al. (2019); Wakkumbura et al. (2021) |
Fuzzy Logic Control (FLC) |
Eficiente |
Los autores hacen observaciones de su aceptable eficiencia en sistemas de semáforos tradicionales; no obstante, debido a esto, su adaptabilidad en situaciones muy complejas no es la mejor. |
|
Yuan et al. (2021); Jin y Ma (2019) |
Gaussian Process |
Eficiente |
Los autores lo comparan con la Fuzzy Logic en cuanto a su utilidad para sistemas de control de tráfico. |
|
Bao et al. (2023); Cheng et al. (2023); Hao et al. (2020); Islam et al. (2022); Chahal et al. (2023) |
Long Short-Term Memory (LSTM) |
Eficiente |
Los autores señalan que es muy útil para predicción de tráfico y registro de información en tiempo real, pero en ocasiones puede tener problemas cuando los datos de tráfico son muy ruidosos. |
|
Tan et al. (2022); Aqib et al. (2019); Bao et al. (2023); Islam et al. (2022); Impedovo et al. (2019) |
Deep Learning |
Ineficiente |
Los autores señalan que por sí sola puede resultar poco eficiente debido a su baja precisión y las grandes cantidades de datos que requiere para el control de tráfico. No obstante, puede utilizarse como base de algoritmos más complejos. |
|
Kim et al. (2023) |
Genetic |
Ineficiente |
El autor señala que, aunque puede resolver problemas complejos de control de tráfico, también puede resultar demasiado lento para su uso en tiempo real. |
|
Cheng et al. (2023) |
Snake Optimization Algorithm |
Ineficiente |
El autor señala que puede ralentizarse en intersecciones de más de dos carriles por dirección. |
|
Yuan et al. (2021); Jin y Ma (2019) |
Bayesian Filter |
Muy eficiente |
Los autores señalaron su gran eficiencia para la predicción de tráfico en diversas situaciones, ya que puede manejar grandes cantidades de datos en tiempo real. |
|
Shin et al. (2019); Vélez-Serrano et al. (2021); Islam et al. (2022) |
Convolutional Neural Network (CNN) |
Muy eficiente |
Los autores señalan que son esenciales para la creación de un modelo inteligente en control de tráfico. |
|
Mukhtar et al. (2023); Rasheed et al. (2022); Joo y Lim (2021); Li et al. (2021); Zheng et al. (2022) |
Deep Q- |
Muy eficiente |
Los autores señalan que mientras cuente con buen entrenamiento aprender una política efectiva puede ser una de las mejores opciones para el control de tráfico debido a su procesamiento por redes. |
|
Damadam et al. (2022); Rasheed et al. (2022); Tan et al. (2022); Wu et al. (2022); Wang et al. (2023); Li et al. (2021); Szoke et al. (2023); Li et al. (2021) |
Deep |
Muy eficiente |
Los autores señalan que es esencial para el aprendizaje recursivo y la mejora constante de la capacidad de toma de decisiones de un modelo inteligente en el sistema de control de tráfico. |
|
Mukhtar et al. (2023) |
Graph |
Muy eficiente |
Los autores señalan que es muy útil y eficiente para el procesamiento de datos estructurados en el control de tráfico debido a su capacidad de lectura de grafos. |
|
Wakkumbura et al. (2021); Suga et al. (2023); Mukhtar et al. (2023); Rasheed et al. (2022); Shehu et al. (2020); Li et al. (2021) |
Multi Agent Technology |
Muy eficiente |
Los autores señalan que, si se logra superar la complejidad de su implementación, puede llegar a resultar extremadamente eficiente y estable. |
4. DISCUSIÓN DE LOS RESULTADOS
Los resultados hallados a través del proceso de revisión de literatura describen la existencia de 6 algoritmos y 10 métodos utilizados para la construcción de sistemas de control de semáforos. Entre estos los más utilizados son el Deep Reinforcement Learning y el Machine Learning, pues sirven como base para la construcción de modelos inteligentes para el cambio de luces y predicción de tráfico. Los artículos también describen la importancia de las CNN y la construcción de una base de datos de entrenamiento amplias para incrementar la precisión de estos sistemas (Islam et al., 2022).
Entre los algoritmos y métodos utilizados, los de mayor eficiencia para la predicción de densidad vehicular y el cambio óptimo de luces son el filtro bayesiano, la tecnología multiagente (Mukhtar et al., 2023), las CNN y el aprendizaje profundo, que demuestran buena adaptabilidad durante horas de congestión de tráfico y eventos específicos como pase de vehículos de emergencia. Los resultados sugieren que, si estos se utilizan para la predicción de la densidad vehicular, se debe iterar varias ocasiones en estratos diferentes del día para evitar incorrectas adecuaciones (Jin & Ma, 2019). Por otro lado, se descartan aquellos que para situaciones de tránsito denso resultan lentos, poco precisos o de mala adaptación como los algoritmos genéticos o el algoritmo de optimización de serpiente.
También se menciona que, para el uso de procesamiento de imagen en estos sistemas, los modelos de mayor utilidad son YOLO, SSD, Faster R-CNN y Mask R-CNN debido a su confiabilidad para el reconocimiento de objetos por imagen. Se enfatiza la superioridad de YOLO frente al resto de modelos debido a su velocidad de procesamiento con su funcionalidad de una sola pasada que resulta eficiente para el reconocimiento de densidad vehicular en tiempo real (Chabchoub et al., 2021). Se resalta que el Mask R-CNN solo se utiliza como extensión a la aplicación del Faster R-CNN (Shin et al., 2019).
Además, se describe que los patrones visuales, priorizados por los autores en el entrenamiento de sus modelos de procesamiento de imagen para la identificación de vehículos, son las formas, el color, las dimensiones y las placas de vehículos (Li et al., 2021). Se menciona que a esta última se le debe brindar mayor atención en la creación de la base de imágenes de entrenamiento para facilitar el reconocimiento de un vehículo frente al resto de objetos.
5. Conclusiones
A través de esta revisión de literatura, se determina que el uso de modelos o algoritmos de IA se convierte en la mejor opción para el desarrollo de soluciones contra la problemática de congestión vehicular y control de semáforos, pues aportan una mayor optimización del control de luces y señales de tránsito debido a su capacidad de predicción de la densidad de tráfico.
Se puede afirmar que el modelo de procesamiento de imagen que se adecúa mejor en el proceso de reconocimiento de vehículos es YOLO debido a los resultados obtenidos por los artículos revisados. Esto se debe a su capacidad para detectar varios objetos a la vez, su rápida toma de decisiones basada en los resultados detectados y su consumo óptimo de recursos computacionales, que permite su aplicación en tiempo real en un sistema de control de semáforos.
A partir del análisis de las observaciones en los artículos revisados, es posible determinar que para el entrenamiento del modelo de reconocimiento de objetos se debe priorizar aquellas secuencias de imágenes que muestran los vehículos y su matrícula al menos una vez por cuadro. Esto se debe a que así se mejora la precisión del modelo inteligente a la hora de distinguir vehículos de otros objetos en movimiento.
De acuerdo con el análisis de los resultados, se concluye que el algoritmo más preciso para la construcción de un sistema de control de semáforos es el filtro bayesiano aplicado en las CNN, pues permite modelar la incertidumbre de los datos del tráfico para facilitar el aprendizaje y predicción de la densidad vehicular, lo que mejora la precisión de las decisiones en el cambio de luces de los semáforos.
REFERENCIAS
Aqib, M., Mehmood, R., Alzahrani, A., Katib, I., Albeshri, A., & Altowaijri, S. M. (2019). Smarter Traffic Prediction Using Big Data, In-Memory Computing, Deep Learning and GPUs. Sensors, 19(9). https://doi.org/10.3390/s19092206
Bao, Y., Huang, J., Shen, Q., Cao, Y., Ding, W., Shi, Z., & Shi, Q. (2023). Spatial–Temporal Complex Graph Convolution Network for Traffic Flow Prediction. Engineering Applications of Artificial Intelligence, 121. https://doi.org/10.1016/j.engappai.2023.106044
Chabchoub, A., Hamouda, A., Al-Ahmadi, S., & Cherif, A. (2021). Intelligent Traffic Light Controller using Fuzzy Logic and Image Processing. International Journal of Advanced Computer Science and Applications, 12(4), 396-399. https://doi.org/10.14569/IJACSA.2021.0120450
Chahal, A., Gulia, P., Gill, N. S., & Priyadarshini, I. (2023). A Hybrid Univariate Traffic Congestion Prediction Model for IoT-Enabled Smart City. Information, 14(5). https://doi.org/10.3390/info14050268
Chatterjee, K., De, A., & Chan, F. T. S. (2019). Real time traffic delay optimization using shadowed type-2 fuzzy rule base. Applied Soft Computing Journal, 74, 226-241. https://doi.org/10.1016/j.asoc.2018.10.008
Cheng, R., Qiao, Z., Li, J., & Huang, J. (2023). Traffic Signal Timing Optimization Model Based on Video Surveillance Data and Snake Optimization Algorithm. Sensors, 23(11). https://doi.org/10.3390/s23115157
Damadam, S., Zourbakhsh, M., Javidan, R., & Faroughi, A. (2022). An Intelligent IoT Based Traffic Light Management System: Deep Reinforcement Learning. Smart Cities, 5(4), 1293-1311. https://doi.org/10.3390/smartcities5040066
Goyal, A., Singh, M., & Aeron, A. (2019). Simulation of traffic optimization to reduce congestion. International Journal of Innovative Technology and Exploring Engineering, 8(11), 3780-3783. https://doi.org/10.35940/ijitee.K2122.0981119
Hao, S., Yang, L., Ding, L., & Guo, Y. (2019). Distributed Cooperative Backpressure-Based Traffic Light Control Method. Journal of Advanced Transportation, 2019(1). https://doi.org/10.1155/2019/7481489
Hao, W., Rong, D., Yi, K., Zeng, Q., Gao, Z., Wu, W., Wei, C., & Scepanovic, B. (2020). Traffic Status Prediction of Arterial Roads Based on the Deep Recurrent Q-Learning. Journal of Advanced Transportation, 2020(1). https://doi.org/10.1155/2020/8831521
Impedovo, D., Balducci, F., Dentamaro, V., & Pirlo, G. (2019). Vehicular traffic congestion classification by visual features and deep learning approaches: A comparison. Sensors, 19(23). https://doi.org/10.3390/s19235213
Islam, Z., Abdel-Aty, M., & Mahmoud, N. (2022). Using CNN-LSTM to predict signal phasing and timing aided by High-Resolution detector data. Transportation Research Part C: Emerging Technologies, 141. https://doi.org/10.1016/j.trc.2022.103742
Jin, J., & Ma, X. (2019). A non-parametric Bayesian framework for traffic-state estimation at signalized intersections. Information Sciences, 498, 21-40. https://doi.org/10.1016/j.ins.2019.05.032
Joo, H., & Lim, Y. (2021). Traffic Signal Time Optimization Based on Deep Q-Network. Applied Sciences, 11(21). https://doi.org/10.3390/app11219850
Kim, M., Schrader, M., Yoon, H. S., & Bittle, J. A. (2023). Optimal Traffic Signal Control Using Priority Metric Based on Real-Time Measured Traffic Information. Sustainability, 15(9). https://doi.org/10.3390/su15097637
Kitchenham, B., Brereton, O. P., Budgen, D., Turner, M., Bailey, J., & Linkman, S. (2009). Systematic literature reviews in software engineering – A systematic literature review. Information and Software Technology, 51(1), 7-15. https://doi.org/10.1016/j.infsof.2008.09.009
Korecki, M., & Helbing, D. (2022). Analytically Guided Reinforcement Learning for Green It and Fluent Traffic. IEEE Access, 10, 96348-96358. https://doi.org/10.1109/ACCESS.2022.3204057
Kumaran, S. K., Mohapatra, S., Dogra, D. P., Roy, P. P., & Kim, B. G. (2019). Computer vision-guided intelligent traffic signaling for isolated intersections. Expert Systems with Applications, 134, 267-278. https://doi.org/10.1016/j.eswa.2019.05.049
Li, Y., Chen, Y., Yuan, S., Liu, J., Zhao, X., Yang, Y., & Liu, Y. (2021). Vehicle detection from road image sequences for intelligent traffic scheduling. Computers and Electrical Engineering, 95. https://doi.org/10.1016/j.compeleceng.2021.107406
Li, Z., Yu, H., Zhang, G., Dong, S., & Xu, C. Z. (2021). Network-wide traffic signal control optimization using a multi-agent deep reinforcement learning. Transportation Research Part C: Emerging Technologies, 125. https://doi.org/10.1016/j.trc.2021.103059
Liu, W. L., Gong, Y. J., Chen, W. N., & Zhang, J. (2020). EvoTSC: An evolutionary computation-based traffic signal controller for large-scale urban transportation networks. Applied Soft Computing, 97. https://doi.org/10.1016/j.asoc.2020.106640
Mukhtar, H., Afzal, A., Alahmari, S., & Yonbawi, S. (2023). CCGN: Centralized collaborative graphical transformer multi-agent reinforcement learning for multi-intersection signal free-corridor. Neural Networks, 166, 396-409. https://doi.org/10.1016/j.neunet.2023.07.027
Phursule, R., Lal, D., Waghere, S., Mughni, M. A., Ransubhe, S., & Shiralkar, C. (2023). Enhancing Traffic Flow Using Computer Vision Based - Dynamic Traffic Light Control and Lane Management. International Journal on Recent and Innovation Trends in Computing and Communication, 11(7S), 386-391. https://doi.org/10.17762/ijritcc.v11i7s.7014
Rasheed, F., Yau, K. L. A., Noor, R. M., & Chong, Y. W. (2022). Deep Reinforcement Learning for Addressing Disruptions in Traffic Light Control. Computers, Materials and Continua, 71(2), 2225-2247. https://doi.org/10.32604/cmc.2022.022952
Shehu, H. A., Sharif, M. H., & Ramadan, R. A. (2020). Distributed Mutual Exclusion Algorithms for Intersection Traffic Problems. IEEE Access, 8, 138277-138296. https://doi.org/10.1109/ACCESS.2020.3012573
Shin, J., Roh, S., & Sohn, K. (2019). Image-Based Learning to Measure the Stopped Delay in an Approach of a Signalized Intersection. IEEE Access, 7, 169888-169898. https://doi.org/10.1109/ACCESS.2019.2955307
Stoilova, K., & Stoilov, T. (2022). Model Predictive Traffic Control by Bi-Level Optimization. Applied Sciences, 12(9). https://doi.org/10.3390/app12094147
Suga, S., Fujimori, R., Yamada, Y., Ihara, F., Takamura, D., Hayashi, K., & Kurihara, S. (2023). Traffic information interpolation method based on traffic flow emergence using swarm intelligence. Artificial Life and Robotics, 28(2), 367-380. https://doi.org/10.1007/s10015-022-00847-7
Szoke, L., Aradi, S., & Bécsi, T. (2023). Traffic Signal Control with Successor Feature-Based Deep Reinforcement Learning Agent. Electronics, 12(6). https://doi.org/10.3390/electronics12061442
Tan, J., Yuan, Q., Guo, W., Xie, N., Liu, F., Wei, J., & Zhang, X. (2022). Deep Reinforcement Learning for Traffic Signal Control Model and Adaptation Study. Sensors, 22(22). https://doi.org/10.3390/s22228732
Tunc, I., & Soylemez, M. T. (2023). Fuzzy logic and deep Q learning based control for traffic lights. Alexandria Engineering Journal, 67, 343-359. https://doi.org/10.1016/j.aej.2022.12.028
Vélez-Serrano, D., Álvaro-Meca, A., Sebastián-Huerta, F., & Vélez-Serrano, J. (2021). Spatio-temporal traffic flow prediction in madrid: An application of residual convolutional neural networks. Mathematics, 9(9). https://doi.org/10.3390/math9091068
Wakkumbura, R. T., Hettige, B., & Edirisuriya, A. (2021). Real-time traffic controlling system using multi-agent technology. Journal Européen des Systèmes Automatisés, 54(4), 633-640. https://doi.org/10.18280/jesa.540413
Wang, H., Zhu, J., & Gu, B. (2023). Model-Based Deep Reinforcement Learning with Traffic Inference for Traffic Signal Control. Applied Sciences, 13(6). https://doi.org/10.3390/app13064010
Wu, Q., Wu, J., Shen, J., Du, B., Telikani, A., Fahmideh, M., & Liang, C. (2022). Distributed agent-based deep reinforcement learning for large scale traffic signal control. Knowledge-Based Systems, 241. https://doi.org/10.1016/j.knosys.2022.108304
Yuan, Y., Zhang, Z., Yang, X. T., & Zhe, S. (2021). Macroscopic traffic flow modeling with physics regularized Gaussian process: A new insight into machine learning applications in transportation. Transportation Research Part B: Methodological, 146, 88-110. https://doi.org/10.1016/j.trb.2021.02.007
Zhang, L., Wang, L., & Zhao, Q. (2020). Traffic State Recognition of Intersection Based on Image Model and PCA Hashing. Journal of Advanced Transportation, 2020(1). https://doi.org/10.1155/2020/3828395
Zhao, P., Yuan, Y., & Guo, T. (2022). Extensible Hierarchical Multi-Agent Reinforcement-Learning Algorithm in Traffic Signal Control. Applied Sciences, 12(24). https://doi.org/10.3390/app122412783
Zheng, Q., Xu, H., Chen, J., Zhang, D., Zhang, K., & Tang, G. (2022). Double Deep Q-Network with Dynamic Bootstrapping for Real-Time Isolated Signal Control: A Traffic Engineering Perspective. Applied Sciences, 12(17). https://doi.org/10.3390/app12178641